[Breadboard/PIC18F4550/PID]Discrete Transfer Function and PID example.
1- Use potentiometer to define setpoint
2- Use RB0 switch to select open loop or closed loop with PID controller
Use octave or matlab to calculate transfer function coeficients:
>>gs = tf([1],[0.2 0.25 1]);
Transfer function 'gs' from input 'u1' to output ...
1
y1: --------------------
0.2 s^2 + 0.25 s + 1
Continuous-time model.
>> gd=c2d(gs,0.1)
Transfer function 'gd' from input 'u1' to output ...
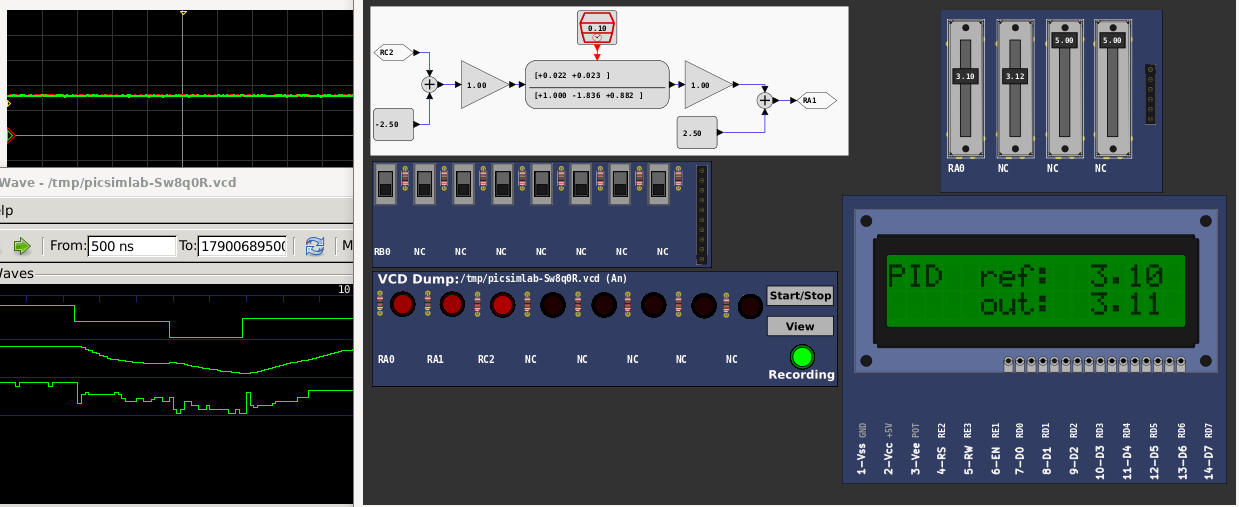
0.02389 z + 0.02291
y1: ----------------------
z^2 - 1.836 z + 0.8825
Discrete-time model Ts=0.1.
MPLABX PID project
| |
 |
Download (pzw)
View Online |